Advanced mode of digital outputs: PWM
The PWM stands for Pulse-Width Modulation. It is for generating a square signal of given frequency and certain duty cycle on a digital output. Typically, it is used for regulating a DC powered component in a way the analog regulation cannot achieve.
Patron
Neuron
Axon
Let's take a 24 V⎓ motor for example. To achieve 100 % RPMs, you have to supply it with 24 V⎓. Logically, to achieve 10 % RPMs, you have to supply it 24/10 = 2.4 V⎓. But if you apply this voltage, the motor will not even start, because of the friction and its load. And if it starts, its torque will be very low. This is one of the downsides of analogue regulation.
The PWM works only on digital outputs, that means it can only output 0 V⎓ or 24 V⎓. To achieve the regulation, the PWM generates a square signal of given frequency. That means it will periodically set the output ON and OFF. The parameter of the regulation is the duty cycle - a proportion of the ON time and OFF time within one period. When the duty cycle is represented in percents and the value is 50 %, the output signal will be 50 % of the period ON and the rest will be OFF. If the duty cycle is 66 %, it will be 66 % of the cycle ON and 34 % OFF.
Selecting a frequency
One of the parameters you need to set is the frequency of the PWM. You have to set this value according to your regulated system. The rule of thumb is - the slower the system you regulate is, the lower the frequency can be and vice versa. Take for example a large water heater. It can take up to several hours to heat a large tank of water to desired temperature, therefor we don't need high frequency regulation. Even tenths or hundredths of Hz will be sufficient. For regulating a LED light, we need to set the frequency to at least 100 Hz, because lower frequencies would be visible by naked eye.
Another thing considering the frequency is the switching element you are turning ON and OFF. If it is a mechanical relay, you have to use very low frequency or you could destroy it. If it is SSR relay, MOSFET or IGBT transistor, you can set couple of kHz or even MHz (always referr to the datasheet of the component).
The frequency of the PWM in Unipi depends on the used resolution. See below.
Resolution of the PWM
Second parameter of the PWM is the resolution. This value indicates in how many steps we want to divide the regulation. If the resolution is 3, we can set the duty cycle to 3 values: 0 %, 50 % and 100 %. If the resolution is 11, we can set it from 0 % to 100 % in the steps of 10 %.
In Unipi controllers, you can set the resolution up to 65536 steps.
The duty cycle
The duty cycle, as mentioned above, is the actual value of the regulation. Typically, you will encounter PWM duty cycle represented as a percentage of the ON time in regard of the period. In the Mervis however, the duty cycle is represented by the number of resolution steps. Let's see how to calculate this value.
resolution - 1
duty_cycle [mervis] = ------------------- * duty_cycle [%]
100
The only correct values of duty_cycle [mervis] are between 0 and resolution - 1. These values you will set from the program.
1. example
resolution = 101 steps (0-100 % in the step of 1 %)
duty_cycle [%] = 34
resolution - 1 101 - 1
duty_cycle [mervis] = ------------------- * duty_cycle [%] = ------------------- * 34 = 34
100 100
For resolution of 101 steps and desired duty_cycle of 34 % we need to set the duty cycle in Mervis to 34. That was easy, let's try something more complicated.
2. example
resolution = 6 steps (0-100 % in the step of 20 %)
duty_cycle [%] = 40
resolution - 1 6 - 1
duty_cycle [mervis] = ------------------- * duty_cycle [%] = -------------- * 40 = 2
100 100
For resolution of 6 steps and desired duty_cycle of 40 % we need to set the duty cycle in Mervis to 2.
Calculations of Mervis configuration parameters
Unfortunatelly, you cannot set the frequency and the resolution values in the Mervis directly. The variables for configuring PWM in Mervis are called PWM_Cycle and PWM_Prescale and you need to calculate their values according to desired resolution and frequency:
PWM_Cycle = resolution - 2
4.8 * 10^7
PWM_Prescale = ------------------------------- - 1
frequency * ( resolution - 1)
The PWM_Cycle and PWM_Prescale variables are 16 bit words, therefor you can set only integer values 0 - 65535. If the result of your calculations is real number, you need to either round it, or change the parameters frequency or resolution.
Alternatively, to get the resolution and frequency from PWM_Cycle and PWM_Prescale values, use these equations:
resolution = PWM_Cycle + 2
4.8 * 10^7
frequency = ----------------------------------------
( PWM_Cycle + 1) * (PWM_Prescale + 1)
1. example
Resolution = 11 (duty cycle 0-100 % with 10 % steps)
Frequency = 4 kHz
PWM_Cycle = resolution - 2 = 11 - 2 = 9
4.8 * 10^7 4.8 * 10^7
PWM_Prescale = ------------------------------- - 1 = --------------------- - 1 = 1199
frequency * ( resolution - 1) 4000 * ( 11 - 1 )
2. example
Resolution = 41 (step 2.5 %)
Frequency = 0.1 Hz
PWM_Cycle = resolution - 2 = 41 - 2 = 39
4.8 * 10^7 4.8 * 10^7
PWM_Prescale = ------------------------------- - 1 = ------------------- - 1 = 119999999
frequency * ( resolution - 1) 0.1 * (41 - 1 )
As you can see, with given resolution and frequency, the PWM_Prescale is larger than its maximum value 65535. We either have to increase the frequency, resolution or both.
3. example
Resolution = 10001 (step 0.01 %)
Frequency = 0.1 Hz
PWM_Cycle = resolution - 2 = 10001 - 2 = 9999
4.8 * 10^7 4.8 * 10^7
PWM_Prescale = ------------------------------- - 1 = ------------------------- - 1 = 47999
frequency * ( resolution - 1) 0.1 * (10001 - 1 )
With increased resolution, we are able to achieve lower frequencies and vice versa. For high frequency PWM, we need to sacrifice the resolution.
Setting the PWM in Mervis
The PWM_Cycle and PWM_Prescale are configuration variables of the Unipi module and cannot be changed from the program. Select the Unipi module in the Left panel. In the Properties panel, you can find the PWM_Cycle and PWM_Prescale variables. Set those according to your calculations. We will set it to PWM_Cycle = 99 and PWM_Prescale = 119. This will set the frequency to 4 kHz with resolution of 101.
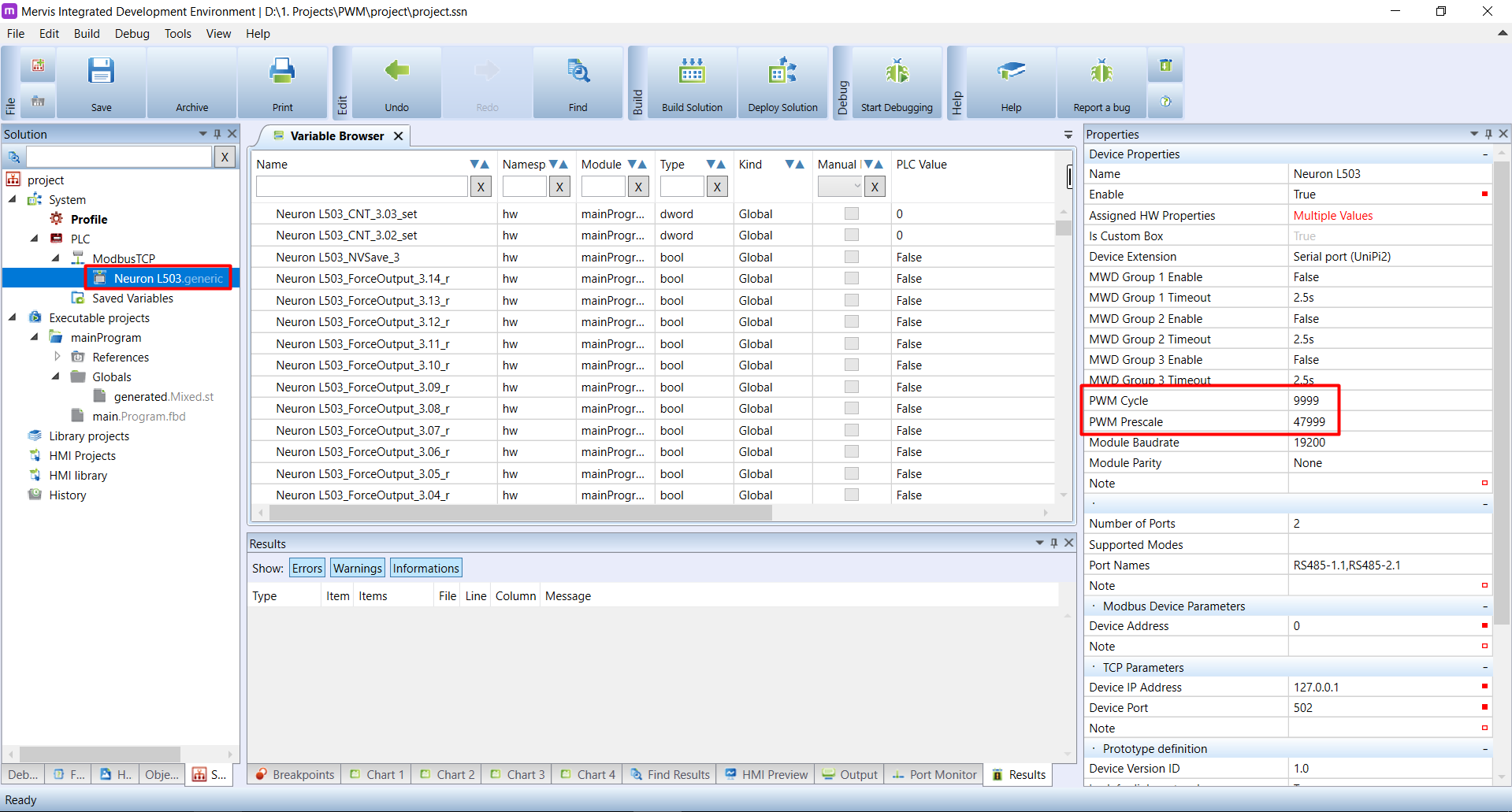
The change has been done on the prototype of the device, which means it is a change in the PLC module's configuration. To upload the configuration, check the Configuration of the Unipi module tutorial.
Now let's check which variables we have available for working with PWM. Select the Variable browser tab on the Main window. Under the Name column, enter the PWM into the search box. You should see similar list.
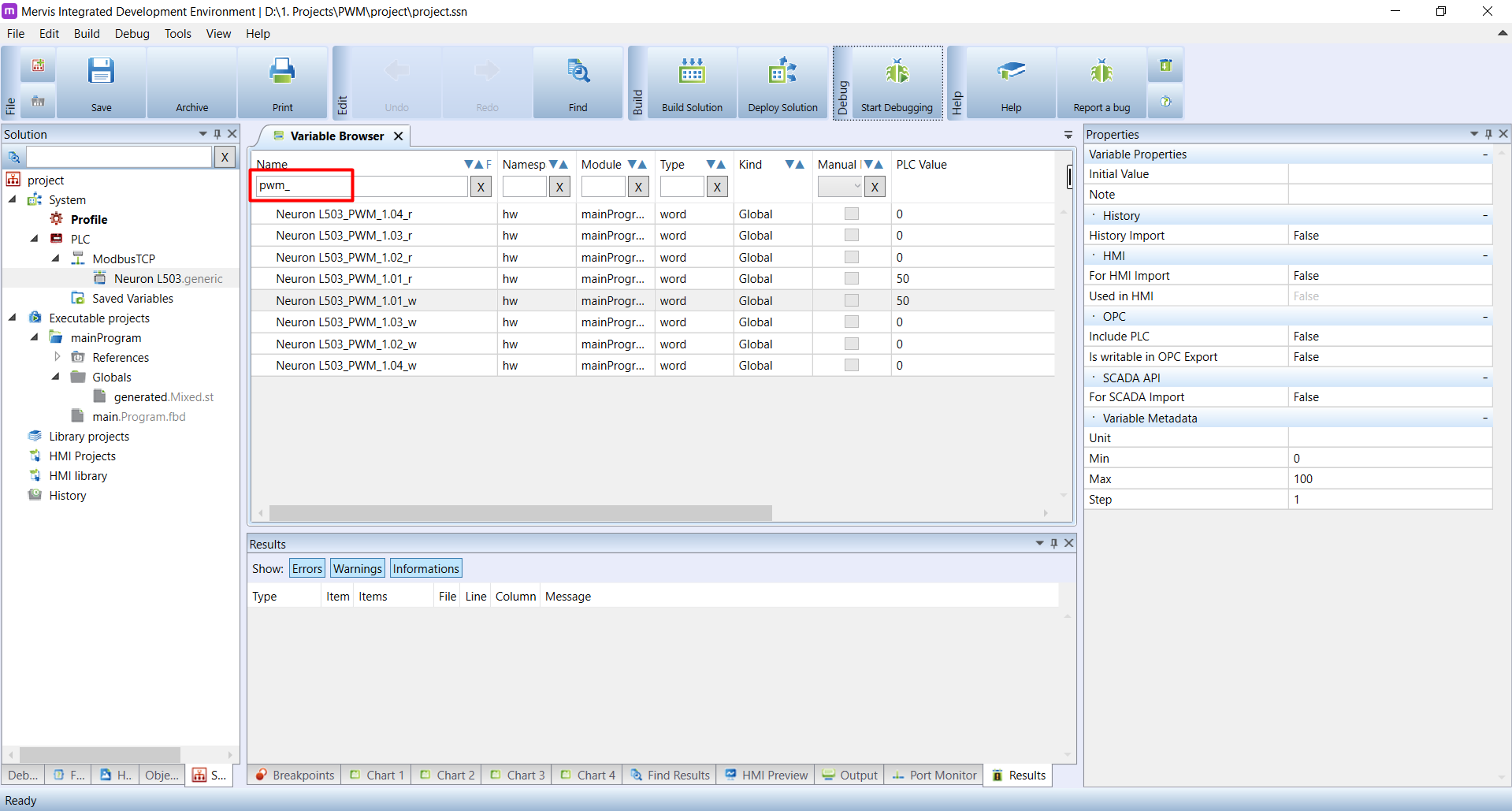
Turn on the Debugging and in the column PLC Value, you will see the current PWM value of DO ports 1.01-1.04. If you didn't change it previously, you should see zeros. Change the value of PWM_1.01 to 50 and confirm by clicking on  or submiting with ENTER.
or submiting with ENTER.
We can hook up the oscilloscope to the Unipi's DO 1.01 and check the waveform.

And we can see the frequency of the wave is 4 kHz with 50 % duty cycle.
What is the magical 4.8 * 10^7 constant?
In calculations of the PWM_Prescale, we use constant 4.8 * 10^7. The constant represents 48MHz clock source for the internal timers/counters which together with PWM_Prescale and PWM_Count set the desired frequency